
Hello, I don’t know if someone has been on the same situation. I want to drive transforms driven by a curve using a motionPath.
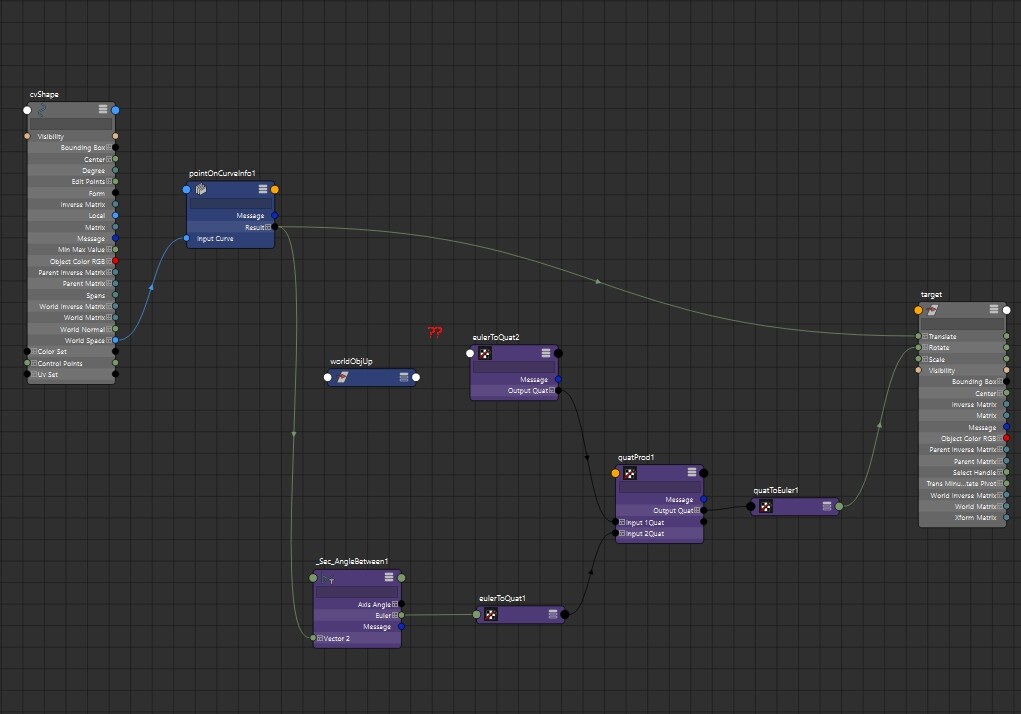
I’m using this setup:
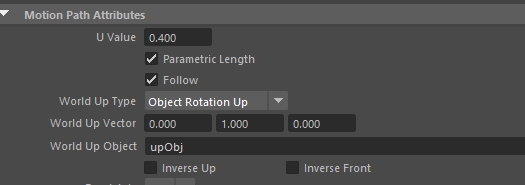
The thing is when the points on the curved are moved, the object flips in the secondary axis which in this case is “Z”. As far as I know the motion path rotation system works the same as an aim constraint.
Also, I tried the ikHandle singleChainSolver, using the position of the motionPath to control the startJoint and using the tangent to control the ikHandle and the problem doesn’t happen
I could use the ikHandle method, but there are too many dag Nodes per transform
{kind=link}
{kind=link}