Hello!
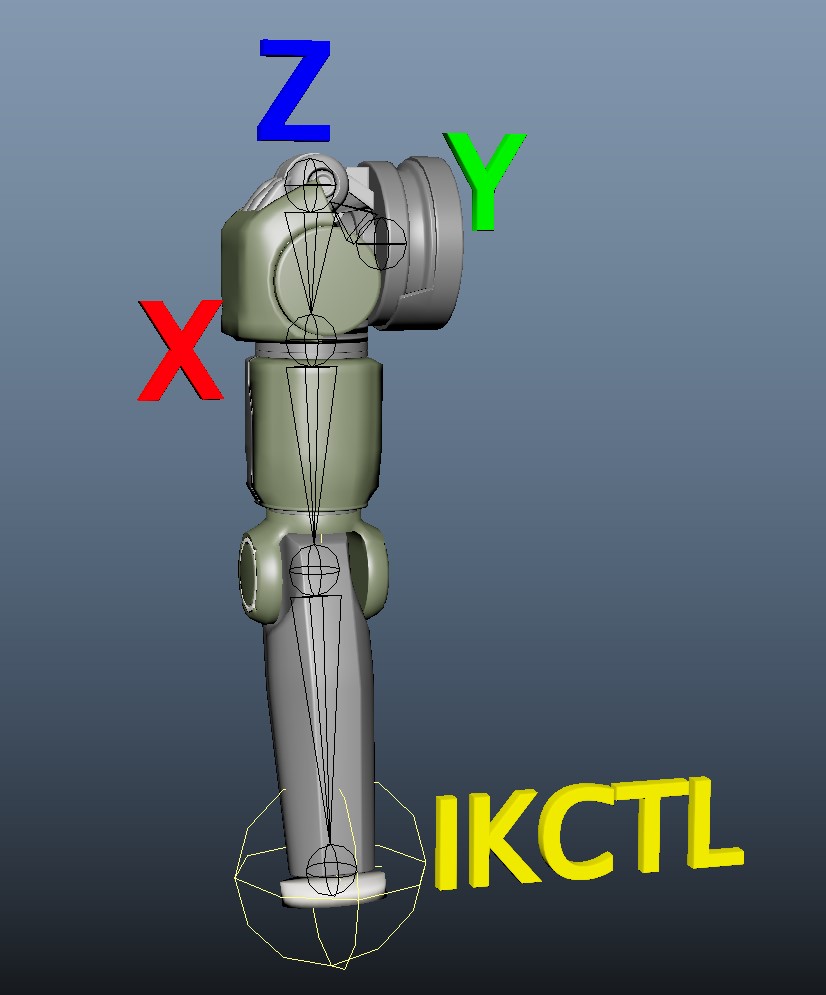
Im trying to create an IK like controller for a droid arm.
I would like to split the rotations to different parts of the shoulder
and make an IK controller or similair.
I did som testing but restricting the axis of the joints and using
an ordinay RPIK solver fails as i suspected it would.
I have always shied away from this kind of setup and reverted to a ballsocket
for the shoulder/hips.
Anyone in here having an idea how to solve something like this?
several ikhandles, aimconstraints, expressions?
I saw an interesting video on an all hinge IK setup:
Grab the Maya file from here if you would like to have a look:
If you are a non Maya user here is an FBX file: