So I’m writing an importer for our engine skeleton data into Maya (to learn C++ and the Maya API)
the skeleton data is stored as Rotation(xyzw Quaternion), Scale(x,y,z vector) and Translation(x,y,z vector)
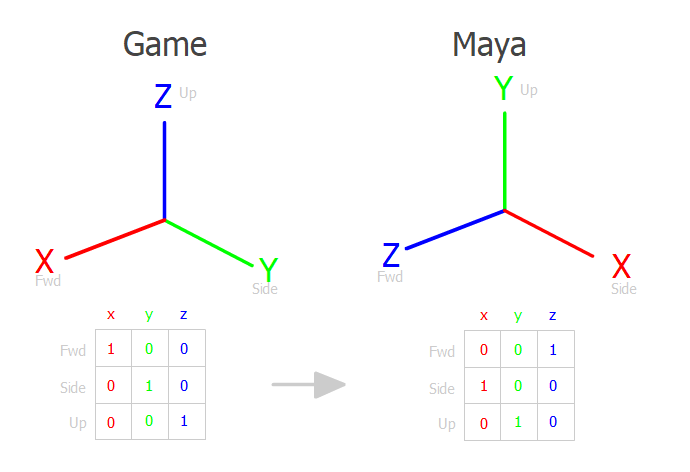
I am confronted by the ubiquitous Z-up vs Y-up conversion.
I solved this ‘brute force’ swapping the xyz components:
/*================================
engine Z up to Maya Y up 4x4 matrix
x y z w
| 0 0 1 0 |
| 1 0 0 0 |
| 0 1 0 0 |
| 0 0 0 1 |
==================================*/
// 'brute force' axis swapping based on the matrix seems to work
void engineToMayaSpaceVector(MVector & v) {
MVector temp;
temp.x = v.y;
temp.y = v.z;
temp.z = v.x;
v = temp;
}
void engineToMayaSpaceQuat(MQuaternion & q) {
MQuaternion temp;
temp.x = q.y;
temp.y = q.z;
temp.z = q.x;
temp.w= q.w;
q= temp;
}
The above code seems to do the trick.
But I believe (correct me if I’m wrong) that this can all be done by a matrix multiplication?
mayaScaleVector = ZtoYupMatrix * engineScaleVector
mayaRotationQuaternion = ZtoYupMatrix * engineRotationQuaternion
mayaTranslateVector = ZtoYupMatrix * engineTranslateVector
When I attempt this I get very incorrect results.
Is my premise wrong, or is my execution flawed?
/*================================
for MMatrix, we need to build a float matrix[4][4]
where the x,y,z,w components are each row (i think)
x y z w
i| 0 0 1 0 |
j| 1 0 0 0 |
k| 0 1 0 0 |
l| 0 0 0 1 |
const float matrix[4][4] ={
xi,xj,xk,xl,
yi,yj,yk,yl,
zi,zk,zj,zl,
wi,wj,wk,wl
}
^^^^^^^^^
(is this the correct way to build the matrix?)
==================================*/
const float ENGINE_TO_MAYA_ARRAY[4][4] = {
0.0, 1.0, 0.0, 0.0,
0.0, 0.0, 1.0, 0.0,
1.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0, 1.0
};
const MMatrix ENGINE_TO_MAYA_MATRIX = ENGINE_TO_MAYA_ARRAY;
//convert by matrix multiply
void engineToMayaSpaceVectorMatrix(MVector & v) {
v = ID_TO_MAYA_MATRIX*v;
}
//convert by matrix multiply
void engineToMayaSpaceQuatMatrix(MQuaternion & q) {
q = ID_TO_MAYA_MATRIX*q;
} ), they care more for what the first, second, and third Euler axes are, and will set up their joints with that in mind to avoid gimbal lock.
), they care more for what the first, second, and third Euler axes are, and will set up their joints with that in mind to avoid gimbal lock.