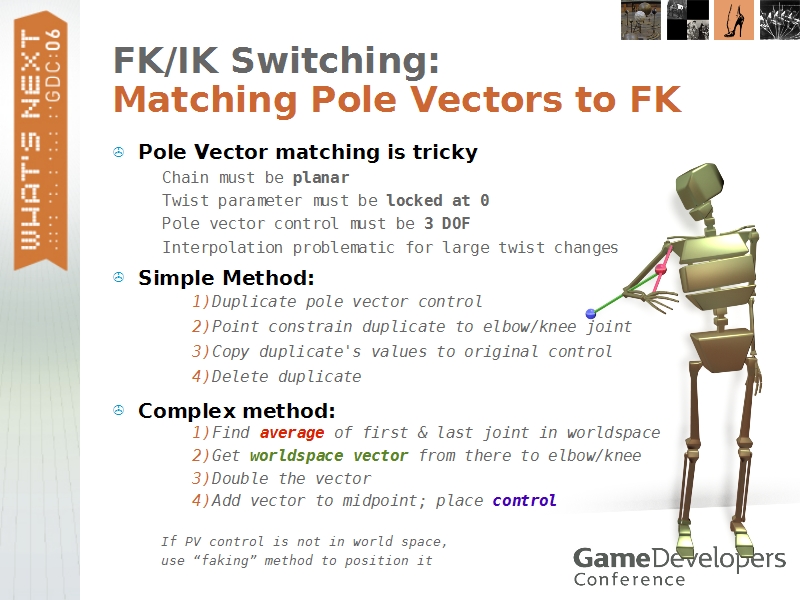
Hello everyone, I have this script for matching IK and FK. I can get everything to match perfectly except the pole vector. Any ideas? I can get it to mostly match having a locator on the PV control parent constrained to the elbow joint, but it isn’t always perfect going between the two systems. It has a tendency for the locator to move when swapping to IK.
These are the scripts I’m using:
(expression 1)
//left arm
//FK
left_arm_shoulder_parentConstraint1.FK_left_arm_shoulderW1 = left_arm_IKFK_switch.Constraints;
left_arm_elbow_parentConstraint1.FK_left_arm_elbowW1 = left_arm_IKFK_switch.Constraints;
left_arm_forearm_orientConstraint1.FK_left_arm_wristW1 = left_arm_IKFK_switch.Constraints;
left_arm_wrist_parentConstraint1.FK_left_arm_wristW1 = left_arm_IKFK_switch.Constraints;
FK_left_arm_shoulder_control.visibility = left_arm_IKFK_switch.Constraints;
//IK
left_arm_shoulder_parentConstraint1.IK_left_arm_shoulderW0 = !left_arm_IKFK_switch.Constraints;
left_arm_elbow_parentConstraint1.IK_left_arm_elbowW0 = !left_arm_IKFK_switch.Constraints;
left_arm_forearm_orientConstraint1.IK_left_arm_wristW0 = !left_arm_IKFK_switch.Constraints;
left_arm_wrist_parentConstraint1.IK_left_arm_wristW0 = !left_arm_IKFK_switch.Constraints;
left_IK_hand_control.visibility = !left_arm_IKFK_switch.Constraints;
left_arm_PV_control.visibility = !left_arm_IKFK_switch.Constraints;
expression 2:
scriptJob -attributeChange “left_arm_IKFK_switch.IKFK” “IKFKMatch()”;
script node:
global proc IKFKMatch()
{
//left arm
int $switchCheck = getAttr left_arm_IKFK_switch.IKFK;
print("switch is at " + $switchCheck);
if ($switchCheck == 0)
{
float $laikXrot = `getAttr left_arm_hand_IK_match_locator.rotateX`;
float $laikYrot = `getAttr left_arm_hand_IK_match_locator.rotateY`;
float $laikZrot = `getAttr left_arm_hand_IK_match_locator.rotateZ`;
float $laikXtrans = `getAttr left_arm_hand_IK_match_locator.translateX`;
float $laikYtrans = `getAttr left_arm_hand_IK_match_locator.translateY`;
float $laikZtrans = `getAttr left_arm_hand_IK_match_locator.translateZ`;
setAttr left_IK_hand_control.rotateX $laikXrot;
setAttr left_IK_hand_control.rotateY $laikYrot;
setAttr left_IK_hand_control.rotateZ $laikZrot;
setAttr left_IK_hand_control.translateX $laikXtrans;
setAttr left_IK_hand_control.translateY $laikYtrans;
setAttr left_IK_hand_control.translateZ $laikZtrans;
float $lapvmatchX = `getAttr left_arm_pv_match_locator.translateX`;
float $lapvmatchY = `getAttr left_arm_pv_match_locator.translateY`;
float $lapvmatchZ = `getAttr left_arm_pv_match_locator.translateZ`;
setAttr left_arm_PV_control.translateX $lapvmatchX;
setAttr left_arm_PV_control.translateY $lapvmatchY;
setAttr left_arm_PV_control.translateZ $lapvmatchZ;
setAttr left_arm_IKFK_switch.constraints 0;
}
if ($switchCheck == 1)
{
float $lashXrot = `getAttr left_arm_shoulder_FK_match_locator.rotateX`;
float $lashYrot = `getAttr left_arm_shoulder_FK_match_locator.rotateY`;
float $lashZrot = `getAttr left_arm_shoulder_FK_match_locator.rotateZ`;
setAttr FK_left_arm_shoulder_control.rotateX $lashXrot;
setAttr FK_left_arm_shoulder_control.rotateY $lashYrot;
setAttr FK_left_arm_shoulder_control.rotateZ $lashZrot;
float $laelXrot = `getAttr left_arm_elbow_FK_match_locator.rotateX`;
float $laelYrot = `getAttr left_arm_elbow_FK_match_locator.rotateY`;
float $laelZrot = `getAttr left_arm_elbow_FK_match_locator.rotateZ`;
setAttr FK_left_arm_elbow_control.rotateX $laelXrot;
setAttr FK_left_arm_elbow_control.rotateY $laelYrot;
setAttr FK_left_arm_elbow_control.rotateZ $laelZrot;
float $lawrXrot = `getAttr left_arm_wrist_FK_match_locator.rotateX`;
float $lawrYrot = `getAttr left_arm_wrist_FK_match_locator.rotateY`;
float $lawrZrot = `getAttr left_arm_wrist_FK_match_locator.rotateZ`;
setAttr FK_left_arm_wrist_control.rotateX $lawrXrot;
setAttr FK_left_arm_wrist_control.rotateY $lawrYrot;
setAttr FK_left_arm_wrist_control.rotateZ $lawrZrot;
setAttr left_arm_IKFK_switch.constraints 1;
}
}
 I suppose you could do it with an expression, but you can also use nodes to do it and not have the hassle of the expression syntax. Might be worth figuring it out in expression/mel/python then just converting to nodes.
I suppose you could do it with an expression, but you can also use nodes to do it and not have the hassle of the expression syntax. Might be worth figuring it out in expression/mel/python then just converting to nodes.